客服電(diàn)話0451-51707266


激光(guāng)焊接過程監測按成像光(guāng)信号的采集角度可 以分為(wèi)旁軸式和同軸式。旁軸式是以與激光(guāng)束成一(yī) 定的角度、從(cóng)焊接熔池的斜上(shàng)方或一(yī)側提取反映焊接過程的信号;同軸式是從(cóng)焊接熔池和小(xiǎo)孔正上(shàng)方、與激光(guāng)束同軸線的方向上(shàng)提取成像信号。根據有無照(zhào)明光(guāng)源?激光(guāng)焊接過程視覺傳感又(yòu)可分為(wèi)主動式和被動式。主動式采用輔助照(zhào)明光(guāng)源對熔池和小(xiǎo)孔進行 旁軸或同軸照(zhào)明?而被動式以等離子體的輻射光(guāng)為(wèi)照(zhào)明光(guāng)或以熔池中液态金屬的輻射光(guāng)為(wèi)成像光(guāng)信号。
旁軸式視覺傳感過程中?傳感器(qì)的定位安裝都比較方便、簡單?其圖像采集光(guāng)路(lù)也非常簡單;常規的旁軸照(zhào)明也比較簡單?但不能(néng)夠看(kàn)清小(xiǎo)孔的平面形狀是其最大的缺陷。另外旁旁軸視覺傳感器(qì)的安裝定位需要比較大的空間。
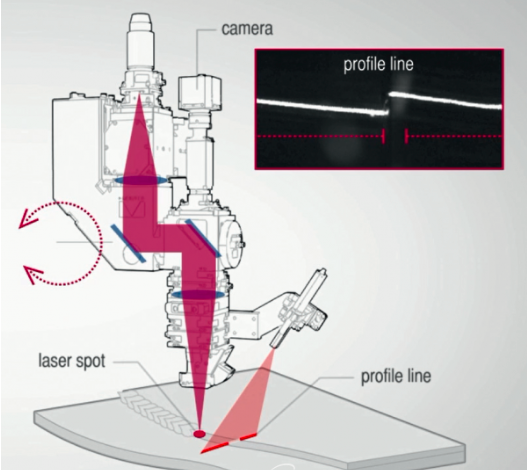
激光(guāng)焊接過程同軸視覺傳感能(néng)夠從(cóng)小(xiǎo)孔的正上(shàng) 方觀測小(xiǎo)孔通(tōng)過對采集到(dào)的熔池和小(xiǎo)孔同軸視覺圖像的處理來監測和判斷焊接過程中的狀态。與旁軸 視覺傳感相(xiàng)比其具有結構緊湊、可與激光(guāng)輸出鏡頭 集成在一(yī)起、占有空間小(xiǎo)等諸多(duō)優點但是從(cóng)激光(guāng)束 中分離提取出同軸成像信号是其最大的技(jì)術(shù)難題。
目前先進的光(guāng)學器(qì)件(jiàn)制備技(jì)術(shù)可以使這個(gè)問題 得到(dào)有效地解決。對 Nd:YAG 等波長(cháng)較短的固體激光(guāng)一(yī)般在激光(guāng)光(guāng)路(lù)中放(fàng)置分光(guāng)鏡使來自(zì)熔池的光(guāng)信号或激光(guāng)束被反射偏離從(cóng)而實現同軸成像信号和 激光(guāng)束光(guāng)路(lù)的分離;而對波長(cháng)較長(cháng)的 CO2激光(guāng)一(yī)般通(tōng)過聚焦反射鏡上(shàng)的微孔使來自(zì)熔池的成像光(guāng)信号透過而被提取出來,表征小(xiǎo)孔深度的變化。這種處理方法具有很大的局 限性其處理結果受焊接條件(jiàn)和等離子體影響很大。
通(tōng)過視覺傳感研究了工(gōng)件(jiàn)焊透狀況、小(xiǎo)孔随焊接速度的變化以及熔深與小(xiǎo)孔和熔池寬度的對應關系可以間接預測激光(guāng)焊接質量。比如對比焊接過程中焊縫熔透狀态由 “未熔透”或“僅熔池透”變為(wèi)“适度熔透(小(xiǎo)孔穿透)”時小(xiǎo)孔圖像變化的規律可為(wèi)激光(guāng)焊接過程熔深閉環控制提供理論依據。
Copyright © 2012-2022 哈爾濱綿遠科技有限公司 版權所有備案号: